登录
登录
 注册
注册
RFID猫门的制作
步骤1:零件清单
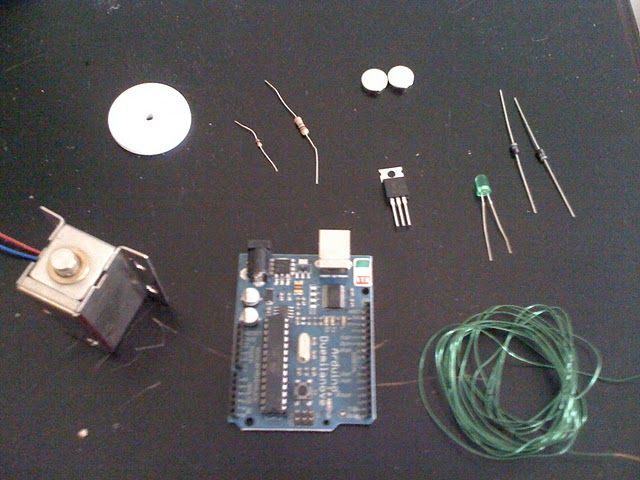



- Arduino Duemilanove
-5V射频阅读器模块(Seeed Studio 125Khz UART或同等产品。大多数阅读器带有小天线。要使用此处讨论的定制天线,您需要一个允许连接外部天线的阅读器)
-RF标签(我使用了这些35mm的圆盘形标签)
-约86英尺的24号电磁线(比照片中的长)
-夏普GP2D12红外接近传感器
-两个12V电子柜锁(诺信电子)。基本上是电磁阀。-一个12V直流电源
-两个TIP120达林顿晶体管
-一个霍尔效应传感器
-一个或多个磁体在大约2cm的范围内激活霍尔效应传感器
-一个100欧姆电阻器
-四个2 KOhm电阻器
-两个按钮
-一个LED
-一个铰链(为了精确起见,一个铰链很容易移动但没有太多横向移动)
》-一块6“ x 9”块1/8“厚的有机玻璃,也许还有另一块约6” x 3“的块用于安装锁
-接线,包括大约27”的特细线(26 AWG或更细)
-螺母,螺栓和锯齿垫圈
-橡胶隔离条或其他柔软的材料,用于填充门和门柱的边缘
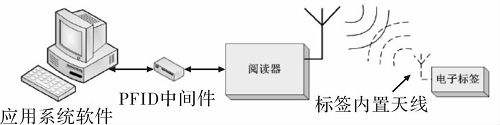
该系统包括多个“模块”(电磁阀,RF读取器等) )。这里的图片之一显示了将模块连接到Arduino(电子设备)的基本计划。在接下来的步骤中,将详细讨论机械零件和每个模块。
步骤2:制作门

门是悬挂在铰链上的有机玻璃翻板。在门柱的底部,将有两个螺线管,在襟翼的每一侧各有一个,以阻止未经授权的动物进入。这非常简单。请记住以下几点:
请确保在静止状态下,挡板处于两个螺线管之间的中心位置。在图片中,在虚线下方中间的红色区域中。为此,它可以使一侧没有重物,并使用摩擦力很小的铰链。
它可以使铰链的横向移动不大(在壁平面内横向移动)。这将有助于使霍尔效应传感器(电磁开关)工作。我将在步骤中对此进行更详细的讨论。..
门需要坚固但重量轻,以便容易将其推开并且在夹住尾巴时也不会受伤。
第3步:制作天线

天线是只不过是连接到射频读取器的电磁线圈。大多数RF阅读器都带有天线,但是有些阅读器允许使用外部天线。在这个项目中,我通过将24规格的电磁线绕着锯开的铲斗缠绕24匝,使其坚固而制成了10 x 10英寸的方形天线。匝之间的距离必须尽可能小。我用两块木头作为隔离物将东西固定在胶合板上,使它与墙壁稍微分开,以便猫可以将其激活得离墙壁更远。我使用的35毫米光盘标签最多可读取到线圈平面4英寸处。射频读取器和天线由Arduino的5v供电。即使Arduino仅使用USB电缆也可以正常工作,但当Arduino用9v电源适配器插入墙上时,RF阅读器仍可以更好地工作。
有关线圈天线的更多信息:
Microchip Inc.用于的天线电路设计RFID应用(pdf)
步骤4:连接RF阅读器

该项目由多个“您需要连接到Arduino并事先进行测试的模块。首先连接RF阅读器。您可以使用Arduino的5v输出为其供电,并使用数字端口(我使用2)来获取信号。我使用的RDM630还具有我不使用的LED引脚。它还具有一个RX引脚,用于将信息发送回RF阅读器,但是我也不使用它。连接天线,获取标签,然后使用Arduino的串行监视器查看是否被检测到。现在,您还可以尝试通过增加或减少匝数,尝试不同的形状等等来改善天线。使用9v电源(不仅是USB)为Adruino供电,至少在我看来这是行不通的。您可以下载名为“ rfid3.pde”的文件进行测试。该代码需要NewSoftSerial.h,可在此处获得
步骤5:添加电磁阀

如图所示,将电磁阀连接到Arduino:将TIP120连接到数字端口5和6,并在两者之间使用2k电阻器。一个针脚接地,另一个针脚连接螺线管,二极管两端跨接一个二极管(确保极性正确),最后连接12v电源。电源的另一根线接地。将其连接到其他地面。只需将包括Arduino在内的所有组件的所有接地连接在一起。
步骤6:添加霍尔效应传感器


霍尔效应传感器用于检测门是否居中,即在关闭门锁的范围内。还有其他解决方案,例如机械/光学旋转编码器,接触传感器,光束中断传感器。选择霍尔效应传感器的主要原因是它不会增加摩擦力,可以完全覆盖它,而且我也很好奇它们的工作方式。
我不想在门上放磁铁,因为那样会它比较重,所以我将开关放在门上,磁铁放在门柱中。我必须使用细的,非常柔软的金属丝,否则它的刚性会使襟翼偏离中心。传感器和电线只需用胶带绑在有机玻璃上即可。我在门柱上有两个小磁铁。在最接近的位置,传感器和磁铁之间的距离为5mm。范围约为3厘米。
将霍尔传感器的信号引脚连接到引脚4,并通过100欧姆电阻连接到5v。将接地引脚连接到其他接地,并将vcc引脚连接到5v。使用适当的电阻器(在绿色的电阻器中使用220欧姆的电阻)向数字引脚7添加一个LED。
下载Hall_effect.pde以测试系统的这一部分。
第7步:添加接近传感器

对于这个系统,我只关心猫的进入,任何生物都可能退出。因此,我只需要在一侧使用RFID。门应该向从另一侧接近的任何动物敞开。 IR接近传感器工作正常。
将Sharp GP2D12的输出引脚连接到模拟端口0,将接地引脚连接到其他地,将vcc引脚连接到5v。
下载IR_test_analog.pde以测试此部分系统
步骤8:添加两个按钮并加载最终代码

最后,您可以添加按钮以手动打开锁(参见示意图)。 。
在这里可以下载的最终代码中,我存储了动物身上所穿的两个标签的值,一个带有访问权限,另一个没有访问权限。当无法进入的动物试图进入时,门立即被锁定。
byte goodcode [6] = {0x1C,0,0xFC,0xB2,0x90};
byte badcode [6] = {0x16,0,0x78,0xE7,0xFE};
您必须找到您正在使用的标签的代码,并将这些值放入数组“ goodcode”和“ badcode”中。值是十六进制,在此编程语言中,其前面需要为“ 0x”。
如果您不想标记另一只猫,则缩短打开时间(变量“ open_time”的值较小)可以有所帮助这使猫的负担得以更快地响应。
在电子设备周围放置一个外壳是个好主意,但这本指南中不会讨论。
最后一点,如果您的天线有较大的范围延伸到安全区域,则可能需要稍微校准天线和接近传感器的位置,以确保未从内部激活RFreader。如果猫在里面并且想出去,则接近传感器必须首先检测到猫。一旦发生这种情况,就可以了,因为在程序的该部分中,不会检查RF阅读器。