登录
登录
 注册
注册
一种基于 RFID 传感器和 LoRa 技术的新型土壤环境监测系统
现代农业面临着在全球人口持续增长的背景下提高生产力的巨大挑战,然而,现有的农业技术在效率方面仍然存在不足,难以满足这一需求。实时监测土壤环境被认为是提升农业生产力的关键因素,但目前广泛应用的无线传感器网络(WSN)在农业领域存在许多局限性。例如,传感器通常暴露在地面,容易受到外部环境的干扰,且这些传感器大多依赖电池供电,一旦被埋入土壤,电池的更换将变得十分困难。此外,废弃的电池可能对土壤环境造成污染。
为了解决这些问题,近年来研究人员对基于LoRa通讯技术的土壤监测系统产生了浓厚兴趣,LoRa技术相比传统的无线通信技术(如ZigBee)具有更远的通信距离、更长的节点寿命以及更强的抗干扰能力。然而,这些LoRa传感器的无线传输器暴露在空气中,仍然可能阻碍农业活动并受环境因素影响。针对以上挑战,本文提出了一种基于RFID传感器和LoRa技术的新型土壤环境监测系统。该系统旨在通过低成本、长时间的精准监测,克服现有技术的不足,为农业领域提供一种更为有效和可持续的解决方案。
方法
该系统的核心由几部分组成,包括嵌入土壤中的RFID传感器、配备RFID读取和LoRa通信功能的巡逻车、农田监控中心以及云平台(图1)。RFID传感器被设计为高精度的环境监测设备,能够埋入土壤中,用于实时监测土壤温度、湿度和氯离子浓度等关键参数。巡逻车在系统中扮演着数据收集的角色,它通过内置的RFID发射器为传感器提供能量,并使用接收器来获取传感器发送的数据信号。巡逻车随后通过LoRa模块,将这些数据传输到监控中心,从而实现远距离的数据通信。
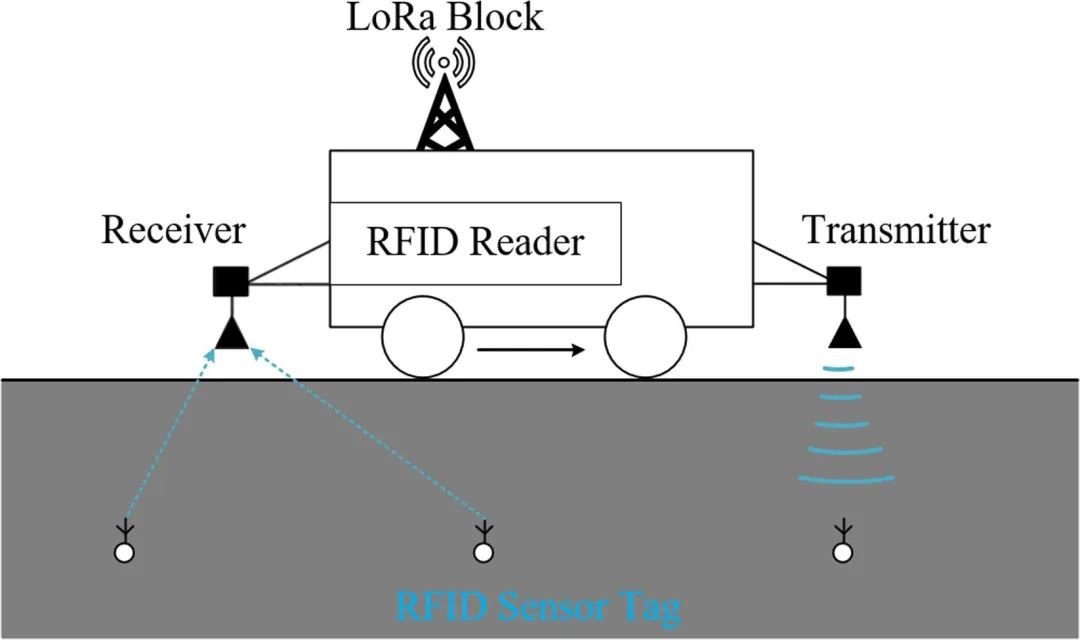
图1 巡逻车通讯结构示意图
为提高数据传输的效率并减少系统的功耗,作者提出了一种创新的通信机制,不再依赖传统的非易失性存储器(NVM)来存储数据,而是将传感器测得的数据直接编码到RFID标签的ID中(图2)。这种方式大幅度缩短了数据读取的时间,降低了功耗,使得系统更加适合长时间、大范围的监测任务。此外,由于系统中RFID传感器的标签数量相对较少,作者在设计中引入了基于EPC Gen2协议的Q算法,并结合阅读器覆盖碰撞避免安排(RCCAA)方法,来有效处理可能出现的多标签通信碰撞问题。通过这些设计,该系统成功地实现了低功耗、高精度、远距离的土壤环境监测,具有较高的实用性和应用前景。

图2 RFID通信流程
RFID传感器的电路设计由能量管理、通信和数字部分组成(图3),能量管理部分通过天线进行能量收集,并采用新型升压整流器,将收集到的射频能量转换为直流电源,以为传感器的其他部分提供稳定的电压。通信部分使用天线和RFID芯片进行信号的无线传输和接收。为优化天线设计,作者选择了尺寸较小但性能优异的单极天线,并使用微带阻抗变换器进行匹配,从而在减小天线尺寸的同时确保了良好的通信性能。

图3 设计结构
结果
作者通过一系列实验验证了所设计的RFID传感器及其在土壤环境监测系统中的性能,图4展示了现场测试环境。在实验室的通信性能测试中,结果显示所设计的RFID传感器在2米的距离内、使用4瓦发射功率时,能够稳定通信。相比于传统数据存储方法,作者提出的新方法显著减少了数据传输时间和功耗。在现场应用中,作者测试了RFID传感器的最大通信距离和不同土壤埋设深度下的性能。结果表明,当土壤湿度为5%且传感器埋深为60厘米时,最大通信距离可达1.3米;然而,超过这一埋深后,信号强度显著下降,通信误码率也随之增加。

图4 现场测试环境
此外,实验还评估了土壤湿度对RFID传感器通信性能的影响。随着土壤湿度的增加,信号强度逐渐减弱,误码率也相应升高,尤其当湿度超过30%时,传感器的通信性能显著下降,见图5。为改善这一问题,作者提出了多传感器布局方案,通过在同一测量点布置两个“T”字形排列的RFID传感器,有效降低了误码率,见图6。最后,实验探讨了巡逻车速度对RFID传感器通信成功率及覆盖面积的影响。结果表明,当巡逻车速度保持在33公里/小时时,通信成功率能够超过90%,并且覆盖面积达到10平方公里,是系统的最佳工作状态。

图5 土壤湿度对接收信号的影响

图6 土壤湿度对传感器位置改进后接收信号的影响
结论
该系统基于RFID传感器和LoRa技术,能够实现对土壤温度、湿度和氯离子浓度的长期、低功耗监测。实验结果表明,所设计的RFID传感器在埋深60厘米、土壤湿度小于30%的条件下,具有1.3米的有效通信距离,并且测量的温度和湿度误差分别为1.5%和1.0%,巡逻车的速度为33公里/小时,效果最佳。