
 登录
登录
 注册
注册
基于RFID技术的室内定位方法简述

由于建筑物遮挡等因素,定位精度达到10米以下的民用GPS室外定位无法为室内定位服务提供高精度服务。同时,伴随着5G技术的发展,新的编码方式、波束赋形、大规模天线阵列、毫米波频谱等为高精度距离测量提供技术支持。因此,室内定位的研究成为无线传感器网络服务的一个重要分支。
通常用于室内定位研究的传感器包括:Wi-Fi、蓝牙、RFID、红外、ZigBee等。本文我们将以RFID技术为蓝本,向大家介绍室内定位原理。
1.RFID定位原理
如图1所示,目前传统的RFID室内定位跟踪系统是一种以计算机为基础,集合了RFID数据采集,RFID数据处理与传输、GIS空间分析和查询等技术形成的智能技术系统。

图1 基于RFID的室内定位系统结构图
其定位依据是结合RFID信号的接收信号强度、相位等参数,利用定位算法完成距离和方位的计算。例如,Saad等人通过捕获标签的相位信息,利用卡尔曼滤波来计算标签的位置[1]。Alippi等人则是利用安装在固定位置的读写器天线,通过旋转对环境中的标签进行扫描,获得标签所在的角度范围及其接收信号强度,并利用贝叶斯网络计算标签的位置[2]。而Choi等人提出一种利用目标标签对参考标签的信号强度的干扰对标签进行定位的方法[3]。清华大学刘云浩教授的团队提出了一种基于无源RFID标签信号强度高阶变换的高精度室内定位方法,其定位精度可以到厘米级别[4-5]。
2.常见的定位算法
2.1 三边测距法
如图2所示,Hightower等提出的SpotON系统[6]是该类型算法的典型代表。系统使用3个或3个以上的读写器作为基站,记录每个读写器读到的标签接收信号强度,通过三角测距的方法,计算出标签的位置[7]。

图2 SpotON系统原理示意图
2.2 LANDMARC定位算法
Landmarc[8]是近年来比较热门的RFID定位系统。其主要思想是引入了参考标签。在室内若干个固定位置分别部署读写器和参考标签,通过比对参考标签和目标标签的接收信号强度,从而推算出目标标签的位置。随后,不少学者对Landmarc系统进行改进以提高其定位精度。其中,Jin等人在Landmarc系统中引入了邻居节点的概念,以此提高定位的效率[9]。Chattopadhyay等人则是通过对参考标签的排列方式和密度进行定量分析,指出Landmarc系统的定位效果依赖于标签的摆放方向,需要标签都按照同样的方向摆放,或者标签天线自身有着良好的全向性[10]。
同时,该团队利用神经网络对Landmarc系统进行改进,通过预先布置的目标标签和参考标签的信号强度,对神经网络进行训练,利用训练好的神经网络,来计算未知的目标标签的位置[11]。Choi等人在系统中引入了一个信号强度修正方法,利用修正后的目标标签和参考标签的信号强度来进行位置计算[12]。香港科技大学的赵戈洋等人提出了基于虚拟参考标签的VIRE(Virtualreferenceelimination)算法,通过线性插值方式结合实际参考标签的位置信息和信号强度,估计虚拟参考标签的位置信息及信号强度,实现室内传输环境的细粒度化[13]。
2.3 到达时间定位算法(TOA)
如图3所示,Xu等人利用到达时间法对人员的运动轨迹进行跟踪[14];Wang等人则是将L-MUSIC方法与到达时间法整合,实现对标签定位[15]。然而,到达时间法存在一定缺陷:
(1)由于室内定位的应用场景通常较小,标签到读写器的距离较近,以电磁波在空气中的传播速度,进行短距离测距需要很高的时间精度;
(2)读写器和标签之间需要精确的同步;
(3)RFID自身较低的通信速率,使得精确的时间戳(Timestamp)的加入较为困难。
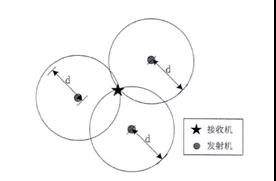
图3 TOA算法原理示意图
除了以上提到的方法之外,波达角(AOA)、波达方向(DOA)等室内定位算法也是研究热点,能够提供较好的定位精度。目前,室内定位应用正处于从研究室走向实际应用阶段,如香港中文大学的室内定位技术在菜鸟驿站中开始进行应用,如何从理论算法的研究到工业生产应用是研究学者仍需解决的问题。














